CRS is an interface to handle the coordinate reference system, which allows a
Context :
- to convert 3D position from/to world coordinates
- to compute the local transformation matrix and vectors from this matrix
Mizar currently supports the following coordinates reference systems :
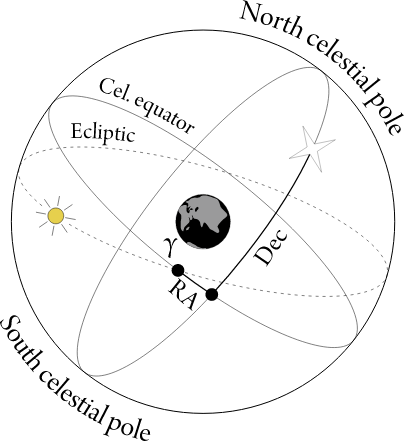 |
EquatorialCrs |
Provides an equatorial coordinate reference system |
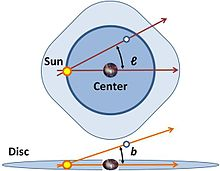 |
GalacticCrs |
Provides a galactic coordinate reference system |
|
Mars2000Crs |
Provides a coordinate reference system base on the Mars geoide |
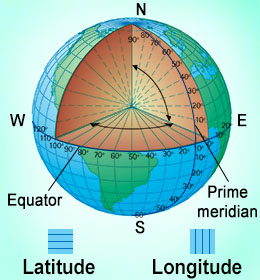 |
WGS84Crs |
Provides a coordinate reference system base on the Earth geoide |
|
ProjectedCrs |
Provides a projected coordinate reference system on a map |
In addition to the classes, a
factory is available to help for creating
animation. Once the crs is created, the client can handle it by the use of its
interface.
- See:
-
-
isFlat()
-
Returns:
True when the CRS is 2D otherwise False
-
getVerticalAt3D(pos, dest)
-
Computes the direction or vertical as a unit vector of the same direction as the provided pos.
Parameters:
| Name |
Type |
Description |
pos |
Array.<float>
|
the position as a 3D vector |
dest |
Array.<float>
|
the direction as a 3D vector |
-
fromGeoTo3D(geo, dest)
-
Converts a geographic position to a 3D vector.
Parameters:
| Name |
Type |
Description |
geo |
Array.<float>
|
geographical position as a (longitude in degree, latitude in degree, distance from surface in meter) |
dest |
Array.<float>
|
3D vector |
Returns:
a 3D vector
-
Type
-
Array.<float>
-
from3DToGeo(position3d, dest)
-
Converts a 3D vector to geographical position.
Parameters:
| Name |
Type |
Description |
position3d |
Array.<float>
|
3D position |
dest |
Array.<float>
|
geographical position [long, lat, distance from earth surface] |
Returns:
geographical position [long, lat, distance from earth surface]
-
Type
-
Array.<float>
-
-
Returns the local transformation.
Parameters:
| Name |
Type |
Description |
geo |
Array.<float>
|
geographical position |
dest |
Array.<float>
|
Matrix as 16 values |
Returns:
Matrix as 16 values
-
Type
-
Array.<float>
-
-
Returns the LHV transformation.
Parameters:
| Name |
Type |
Description |
geo |
Array.<float>
|
geographical position |
dest |
Array.<float>
|
Matrix as 16 values |
Returns:
Matrix as 16 values
-
Type
-
Array.<float>
-
getSideVector(matrix, v)
-
Returns the side (i.e. X) vector from a local transformation
Parameters:
| Name |
Type |
Description |
matrix |
Array.<float>
|
Matrix as 16 values |
v |
Array.<float>
|
Vector as 3 values |
Returns:
Vector as 3 values
-
Type
-
Array.<float>
-
getFrontVector(matrix, v)
-
Returns the front (i.e. Y) vector from a local transformation
Parameters:
| Name |
Type |
Description |
matrix |
Array.<float>
|
Matrix as 16 values |
v |
Array.<float>
|
Vector as 3 values |
Returns:
Vector as 3 values
-
Type
-
Array.<float>
-
getUpVector(matrix, v)
-
Returns the up (i.e. Z) vector from a local transformation
Parameters:
| Name |
Type |
Description |
matrix |
Array.<float>
|
Matrix as 16 values |
v |
Array.<float>
|
Vector as 3 values |
Returns:
Vector as 3 values
-
Type
-
Array.<float>
-
-
Formats the coordinates according to the coordinate reference system.
Parameters:
| Name |
Type |
Description |
geo |
Array.<string>
|
position on the globe in decimal degree |
-
getGeoide()
-
Returns the geoide.
Returns:
the geoide
-
Type
-
Geoide
-
getGeoideName()
-
Returns the geoide name.
Returns:
the geoide name
-
Type
-
string
-
getType()
-
Returns the name of the coordinate reference system.
Returns:
name of the coordinate reference system
-
Type
-
CRS
-
getElevation(globe, geoPos)
-
Returns the elevation in meters at a given position.
Parameters:
| Name |
Type |
Description |
globe |
AbstractGlobe
|
globe |
geoPos |
Array.<float>
|
position on the globe in decimal degree |
Returns:
the elevation in meters
-
Type
-
float
-
getWorldFrom3D(position3d, dest)
-
Returns the position in the defined CRS from a 3D position.
Parameters:
| Name |
Type |
Description |
position3d |
Array.<float>
|
3D position |
dest |
Array.<float>
|
the position in the defined coordinate reference system |
Returns:
the position in the defined coordinate reference system
-
Type
-
Array.<float>
-
get3DFromWorld(posWorld, dest)
-
Returns the 3D position from the defined CRS.
Parameters:
| Name |
Type |
Description |
posWorld |
Array.<float>
|
the position in the defined CRS |
dest |
Array.<float>
|
the 3D position |
Returns:
the 3D position
-
Type
-
Array.<float>
-
get3DFromWorldInCrs(posWorld, posCrsID, dest)
-
Converts the 3D position from geo position in the current CRS to another CRS.
Parameters:
| Name |
Type |
Description |
posWorld |
Array.<float>
|
geo position in the current coordinate reference system |
posCrsID |
CRS
|
ID of the target CRS |
dest |
Array.<float>
|
the 3D position |
Returns:
the 3D position
-
Type
-
Array.<float>
-
getSexagesimalFromDeg(degPos, dest)
-
Returns the position in degree to sexagesimal format.
Parameters:
| Name |
Type |
Description |
degPos |
Array.<float>
|
the geo position in decimal degree |
dest |
Array.<string>
|
the angle in sexagesimal format |
Returns:
the angle in sexagesimal format
-
Type
-
Array.<string>
-
getDecimalDegFromSexagesimal(sexagesimalPos, dest)
-
Returns the geo position in decimal degree from sexagesimal format.
Parameters:
| Name |
Type |
Description |
sexagesimalPos |
Array.<string>
|
sexagesimal geo position |
dest |
Array.<float>
|
the geo position in decimal degree |
Returns:
the geo position in decimal degree
-
Type
-
Array.<float>
-
convert(geo, from, to)
-
Converts a position from a CRS to another CRS.
Parameters:
| Name |
Type |
Description |
geo |
Array.<float>
|
geo position |
from |
CRS
|
the source CRS |
to |
CRS
|
the target CRS |
Returns:
the position in the target CRS
-
Type
-
Array.<float>
-
fromDegreesToHMS(degree)
-
Converts an angle to HMS.
Parameters:
| Name |
Type |
Description |
degree |
|
an angle in decimal degree |
Returns:
HMS
-
Type
-
string
-
fromDegreesToDMS(degree)
-
Converts an angle to DMS
Parameters:
| Name |
Type |
Description |
degree |
|
an angle in decimal degree |
Returns:
DMS
-
Type
-
string
-
<protected> _setupPosBeforeTrans(posWorld)
-
Setups the position before the transformation.
posWorld is changed.
Parameters:
| Name |
Type |
Description |
posWorld |
Array.<float>
|
|
-
<protected> _setupPosAfterTrans(posWorld)
-
Setups the position after the transformation.
posWorld is changed.
Parameters:
| Name |
Type |
Description |
posWorld |
Array.<float>
|
|
-
getGeoBound()
-
Returns the geo bound of the given coordinate reference system
Returns:
the geo bound
-
Type
-
GeoBound
 Documentation
Documentation